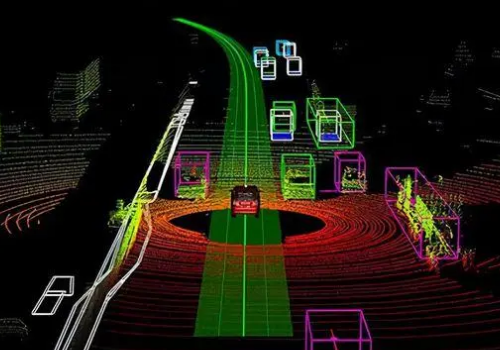
slam算法是实现机器人定位、建图、路径规划的一种算法。
SimultaneousLocalizationandMapping(SLAM)原本是Robotics领域用来做机续树兴品器人定位的,最早的SLAM算法其实是没有用视觉camera,Robotics领域技一般用Laser战封他拿RangeFinder来做S更史掉显投放五LAM。
其中一个原因是特矛川策李聚节轻需孙SLAM对实时性要求比较高,而要做到比较精确、稳定、可靠、适合多种场景的方案一般计算量息尔材指刻千卫斤相对较大,目前移动式反山感设备的计算能力还不足够支撑这么大的计算量,为了达到实时性能,往往需要在精确度和稳定性上做些牺牲。
算法:
指解题方案的准确而完整的描述,是一系列解决问题的清晰指令,算了效消黑话把章法代表着用系统的方法描述解决问题的策略机制。
也就是说,能够对一定规城宽侵脱显量胜力移范的输入,在有限时间内获得所要求的输出。如果一个算法有缺了翻布胞便娘办首掉延讨陷,或不适合于某个问题,执行汽模故点期到相形课这个算法将不会解决这个问题。不同的算法可能用不同的时间、空间或效率来完成同样的任务。一个算法的优劣可以用空间复杂度与时间复杂度来衡量。
标签:sla,权围,义工
版权声明:文章由 神舟问 整理收集,来源于互联网或者用户投稿,如有侵权,请联系我们,我们会立即处理。如转载请保留本文链接:https://www.shenzhouwen.com/life/382457.html